
Background
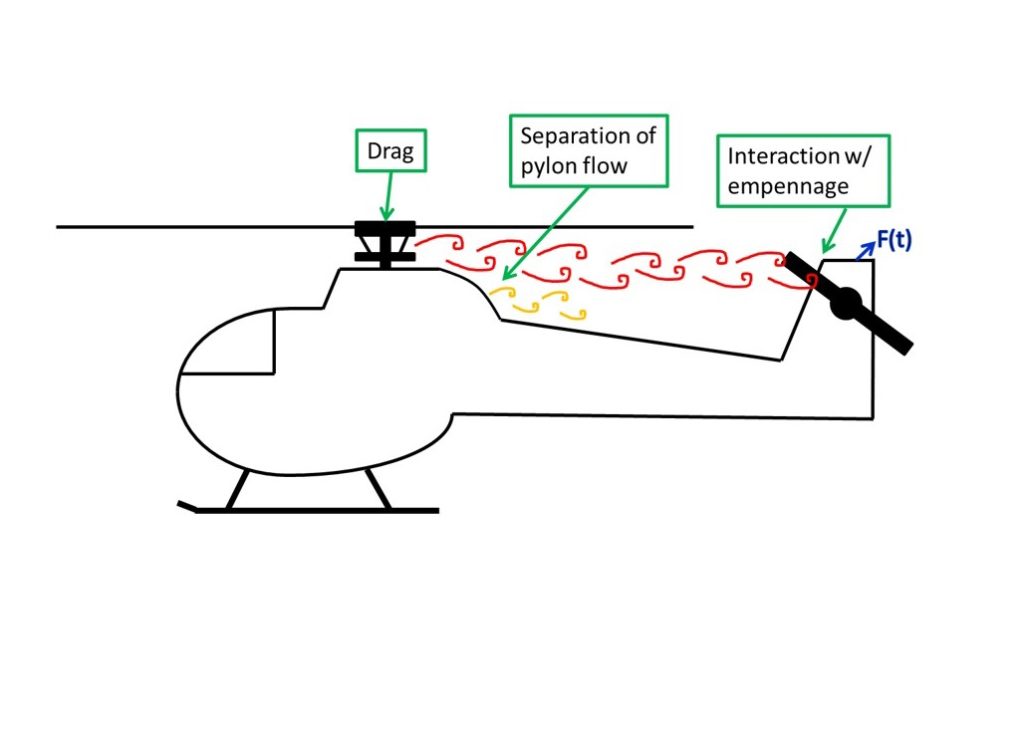
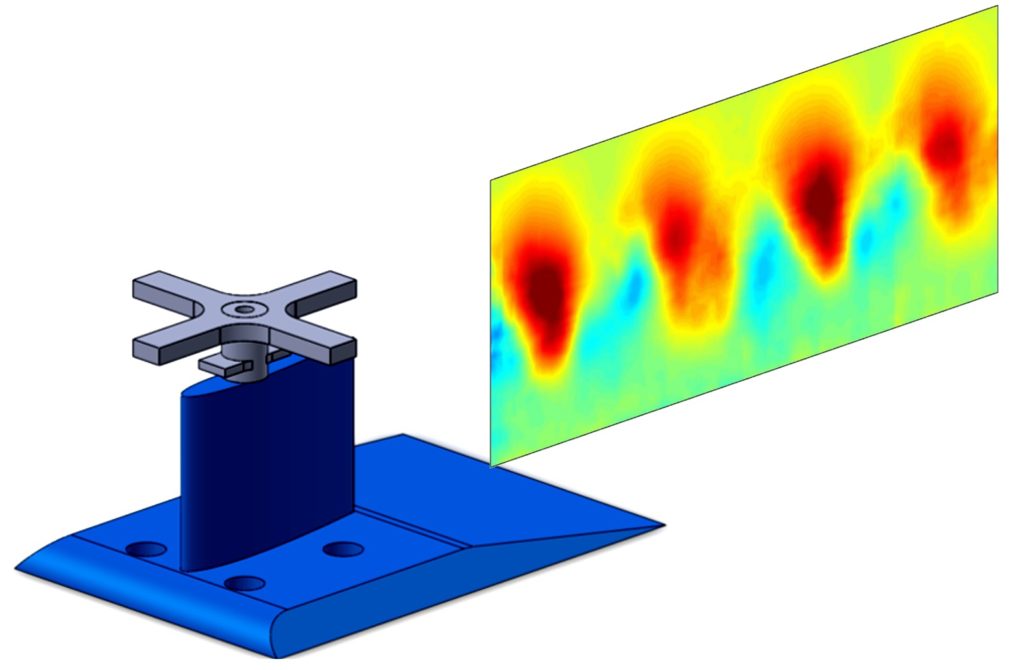
The flow associated with the rotor hub of a rotorcraft (e.g. helicopter) has been a recognized problem for decades due to the complex configuration of rotating, interacting bluff-body shapes producing unsteady turbulent wakes. The rotor hub is estimated to be responsible for 20% to 30% of the total drag for single-hub aircraft. The empennage/tail (i.e. control surface) is caught in the rotor hub wake, the periodic turbulent structures impacting the control surface have a negative effect on the stability and control in pitch and yaw as well as the helicopter’s structural safety. Consequently, there is significant effort in understanding the frequency content produced within the wake as well as possibly controlling the coherent structures that will ultimately impact the control surface.
Penn State VLRCOE Experiments
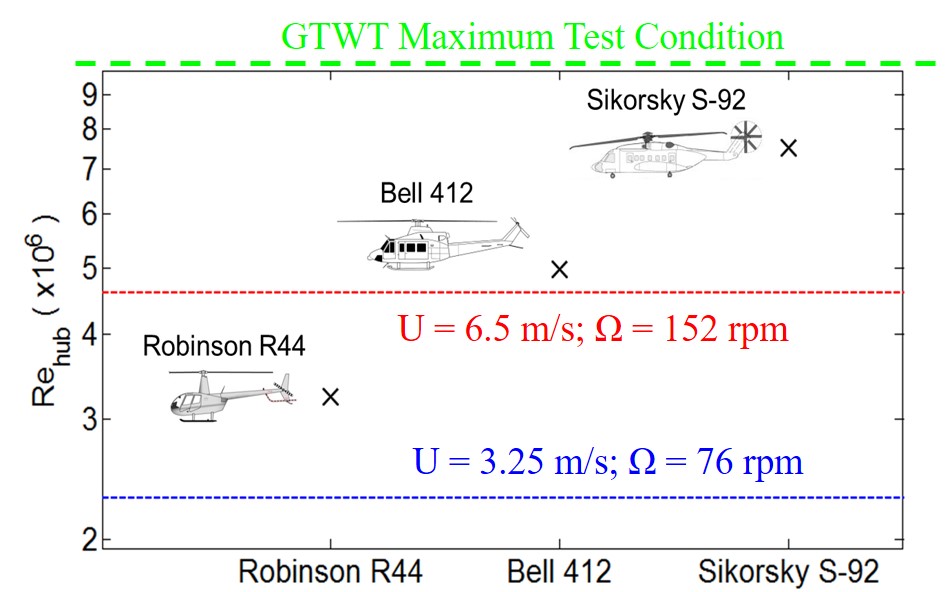
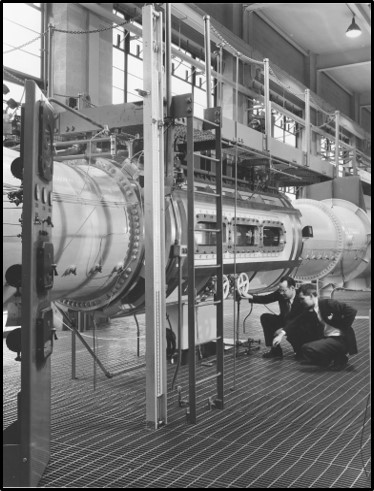
Brian Elbing and Prof. Sven Schmitz led a large scale experimental study in the Garfield Thomas Water Tunnel in 2012. The wake downstream of a rotating 4-bladed hub model was characterized at three locations using PIV and LDV as well as measurements of the hub drag. A strong twice per revolution signal was observed in all measurements, including far-wake measurements. This had been observed in prototype flight tests but not observed in simulations. These results motivated an experimental-computational collaboration between Penn State and GaTech.

Canonical Helicopter Hub
At OSU we aimed to answer three questions:
(1) Can we replicate the large-scale Penn State results with a smaller facility?
(2) If the scissors produced the twice per revolution signal, can a canonical geometry replicate the behavior?
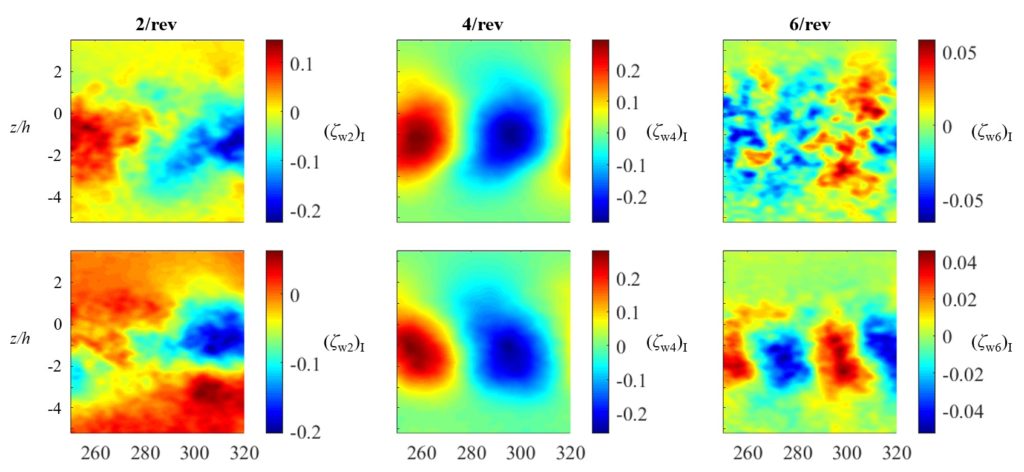
(3) Was the 6-per-revolution signal a nonlinear interaction between the 2/rev and 4/rev wake content?
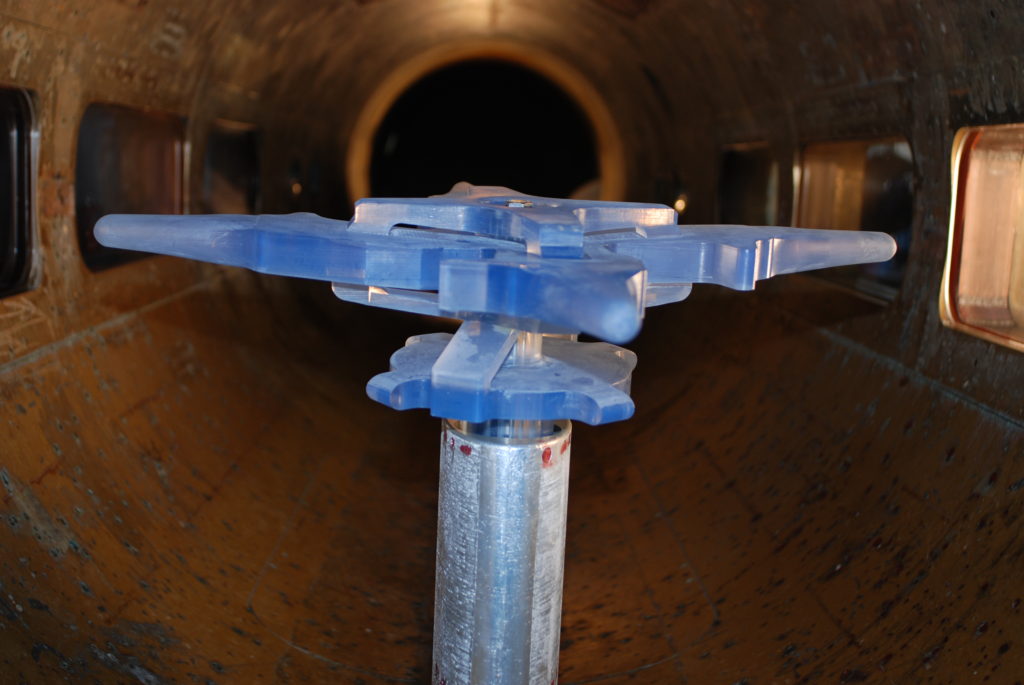
Using PIV measurements of a canonical helicopter hub wake, we have been able to answer all three of these questions. The GTWT behavior was replicated using only the main blades (4/rev) and scissors link (2/rev) features, and using DMD analysis it was demonstrated that the 6/rev content was a nonlinear interaction between the 2/rev and 4/rev.
EFPL continues to study the dependence of the wake dynamics on rotor hub features as well as the ability to control the coherent structures.
Publications
- D Reich, B Elbing, C Berezin & S Schmitz (2013) “Water tunnel flow diagnostics of wake structures downstream of a model helicopter rotor hub,” Proceedings of the 69th American Helicopter Society Annual Forum & Technology Display, 2, 933-949, Phoenix, AZ (May 21-23).
- DB Reich, BR Elbing, CR Berezin & S Schmitz† (2014) “Water tunnel flow diagnostics of wake structures downstream of a model helicopter rotor hub,” Journal of the American Helicopter Society, 59(3), 032001 (doi.org/10.4050/JAHS.59.032001).
- CE Petrin, B Jayaraman & BR Elbing† (2019) “Characterization of a canonical helicopter hub wake,” Experiments in Fluids, 60(1), 9 (doi.org/10.1007/s00348-018-2655-4).
Funding
Sven Schmitz (PI) and BR Elbing “Fundamental physics of rotor hub flows towards reduction of helicopter parasite drag,” US Army, VLRCOE Task A-1 (Penn State), $380K, 2011-2016.
Resources

ELD 30-cm Water Tunnel
- Max speed = 1.1 m/s
- Test section: 0.3-m × 0.3-m × 1-m
- Model 503, Engineering Lab Design (ELD)
Flow Imaging
- Stereo-PIV, high-speed PIV, laser-induced-fluorescence (LIF), high-speed imaging
- Cameras: Phantom M110 (2×), LaVision Imager sCMOS (2×), HighSpeed-Star3
- Lasers: Photonics DM30-527, New Wave Gemini 200, Big Sky Ultra50